
Для чего нужен ИПКАС
ИПКАС предназначен для компьютерного моделирования в виртуальной среде навигационных сценариев автономного судовождения.
Автономные суда
Разработка, тестирование и отладка алгоритмов управления автономным судном или группой судов
Береговые станции
Проектирование и тестирование береговых диспетчерских станций дистанционного управления
Порты и сооружения
Проектирование портов и сооружений, предназначенных для работы с автономными судами
Как работает ИПКАС
ИПКАС – это вэб-приложение. Это означает, что приложение не потребует установки на локальный компьютер. Несмотря на то, что для некоторых элементов функциональности потребуется предварительная загрузка данных, для использования большинства возможностей ИПКАС достаточно просто перейти по предоставленному адресу в интернете.
Гибкая архитектура ИПКАС позволяет установить весь комплекс на один локальный компьютер без подключения к сети интернет. Также возможно развернуть комплекс в локальной сети из нескольких компьютеров без выхода в Интернет. Однако локальная установка затруднит оперативное получение обновлений и улучшение функциональности комплекса.
Из чего состоит комплекс
ИПКАС состоит из набора компонентов, к которым пользователь может подключиться удаленно.
Можно использовать сразу все компоненты или только часть из них.
Управление
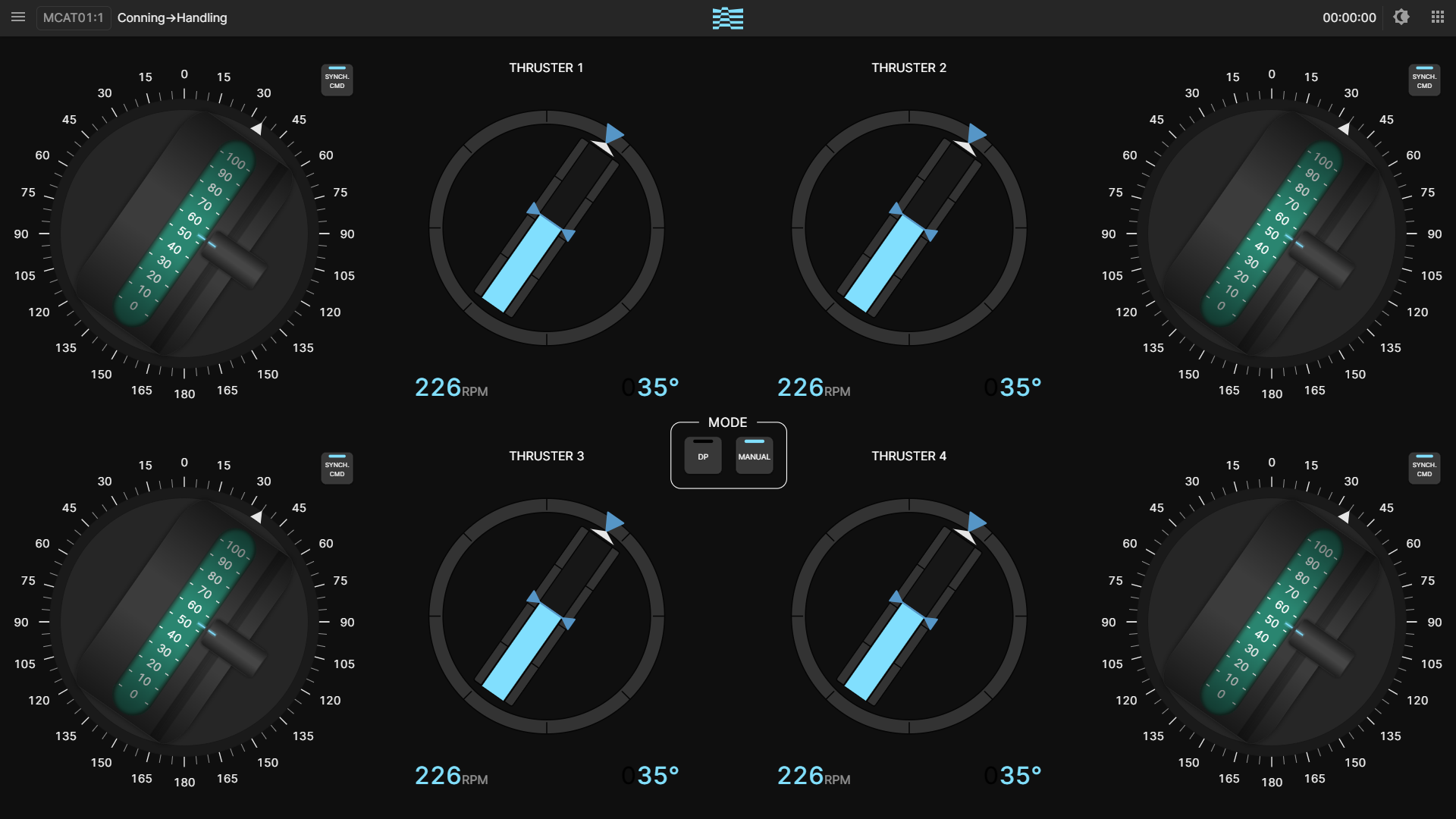
Компонент представляет из себя программную эмуляцию интегрированной мостиковой системы или диспетчерского пульта удаленного управления судами. Может использоваться для ручного управления судном, моделирования сценариев дистанционного управления, а также контроля текущего состояния судна или группы судов.
Испытатель
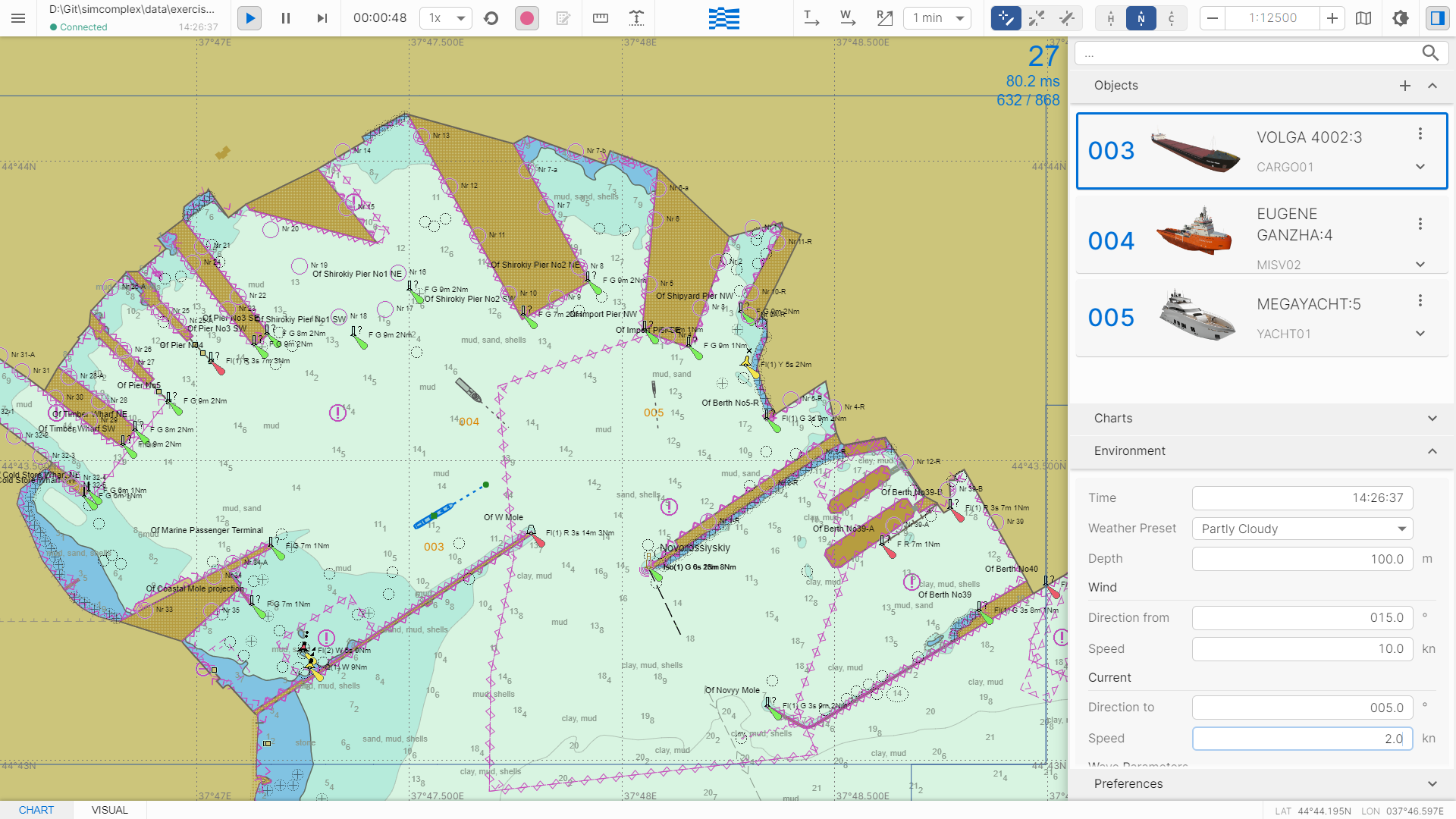
Компонент дает возможность управлять симуляцией, в частности:
- Подготавливать новые и редактировать существующие сценарии
- Выбирать область проведения сценария: географический район плавания, время суток
- Задавать и изменять погодные условия: волнение, ветер, течение, осадки и видимость
- Добавлять в заданную позицию или удалять объекты
- Задавать и изменять параметры объектов: позицию, курс, скорость, маршрут и т.п.
- Запускать, приостанавливать, возобновлять испытание
- Наблюдать за ходом сценария: при помощи электронной карты, панелей свойств объектов и оборудования
- Перехватывать управление судном – при помощи встроенной программной панели управления судном
- Перехватывать управление судном или переназначать управление внешней системе
- Сохранять запись выполнения сценария и проигрывать её
Обзор

Компонент дает доступ к трехмерной визуализации. Может использоваться для эмуляции вида из навигационной рубки, изображения с видео камер, визуального контроля за ходом симуляции в различных условиях освещенности и погодных условиях
Вспомогательные компоненты

Шлюз протоколов
Компонент предоставляет возможность подключать к ИПКАС внешние судовые системы, например систему динамического позиционирования. Дает возможность взаимодействовать с реальным судовым оборудованием при проведении симуляции.
Шлюз программного интерфейса
Компонент дает возможность управлять симуляцией при помощи скриптов на языке Python. Дублирует функциональность компонента Испытатель, но вместо графического интерфейса предоставляет программный интерфейс. Позволяет реализовать автоматизированные сценарии, осуществляющие компьютерное моделирование, загрузку, сбор и анализ данных, управление судном и другие возможности.
Библиотека прототипов
Набор готовых Python скриптов для работы со шлюзом программного интерфейса. Представляет из себя набор прототипов систем автономного судовождения, подготовленных разработчиками ИПКАС. Прототипы могут быть использованы для тестирования и отладки высокоуровневых систем управления (например систем принятия решения) или в качестве основы для разработки пользовательских систем автономного судовождения.
Как работать с ИПКАС
В зависимости от задач пользователя, сценарии работы с ИПКАС могут отличаться.
РАЗРАБОТКА АЛГОРИТМОВ УПРАВЛЕНИЯ СУДНОМ ИЛИ ГРУППОЙ СУДОВ
ИПКАС дает возможность разработчикам сфокусироваться на разработке алгоритмов, не заботясь о
программировании симулятора.
Чтобы воспользоваться функционалом ИПКАС разработчику необходимо скачать Python модуль ИПКАС, в котором
реализован шлюз программного интерфейса. Подключив модуль к коду алгоритма управления, разработчик получит
возможность создавать симуляцию на сервере ИПКАС и управлять ей, получая полный набор данных о текущем
состоянии симуляции. Также в симуляцию можно добавить встречные суда, суда-цели и просто объекты на море.
При этом ИПКАС дает возможность настроить задержку сигнала, сбои датчиков или систем управления на судне.
Python модуль ИПКАС не накладывает ограничений на разрабатываемые алгоритмы, это могут быть как
классические алгоритмы управления, так и алгоритмы на основе машинного обучения и искусственного
интеллекта.
Для настройки параметров симуляции и анализа результатов с помощью GUI, разработчик может, используя
вэб-браузер, подключиться к компонентам Испытатель и Управление. Для визуального контроля работы
алгоритмов
или эмуляции изображения с камер видеонаблюдения можно установить компонент Обзор.
С помощью компонента Шлюз протоколов ИПКАС, можно подключить к симуляции реальные судовые или береговые
системы.
РАЗРАБОТКА СИСТЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СУДНОМ ИЛИ ГРУППОЙ СУДОВ
Для систем дистанционного управления ИПКАС предоставляет возможность эмуляции береговой диспетчерской
станции, а также мобильных и носимых систем управления судном или группой судов.
Чтобы воспользоваться функционалом ИПКАС, необходимо сконфигурировать панели управления и ввода/вывода
данных, в соответствии с проектом системы управления, а затем подключиться к компоненту Управление,
используя вэб-браузер, запущенный на одном или нескольких настольных компьютерах. Для эмуляции носимых
устройств можно использовать браузер, запущенный на мобильном устройстве (планшете, смартфоне или
ноутбуке).
Подключившись к компоненту Испытатель через вэб-браузер, разработчик может задать параметры симуляции,
выбрать район плавания, добавить судно или суда, которыми будет осуществляться дистанционное управление,
добавить суда, имитирующие трафик в районе плавания и т.д. При этом ИПКАС дает возможность настроить
задержку сигнала, сбои датчиков или систем управления на судне.
Компонент Обзор позволит эмулировать видеокамеры, установленные на дистанционно управляемом судне, а также
визуально контролировать симуляцию в различных условиях освещенности и погодных условиях.
С помощью компонента Шлюз протоколов ИПКАС можно подключить к симуляции реальные судовые или береговые
системы.
ТЕСТИРОВАНИЕ ОТДЕЛЬНЫХ АВТОМАТИЗИРОВАННЫХ СИСТЕМ СУДНА
При помощи компонента Шлюз протоколов к ИПКАС можно подключить автоматизированное судовое
оборудование и протестировать его работу.
Для разработки и отладки сторонней системы автоматики можно также воспользоваться компонентом Шлюз
программного интерфейса, что позволит взаимодействовать с математическими моделями судовых систем,
реализованных в ИПКАС и обеспечит быстрое прототипирование и апробацию проектных решений.
При отладке автоматизированной системы, модель судна может управляться в ручном режиме с использованием
компонента Управление. При этом пользователю будут доступны настройки задержки сигналов, имитация сбоя
датчиков или других систем судна для тестирования аварийных и нештатных режимов работы.
ОБУЧЕНИЕ ОПЕРАТОРОВ И КОМАНДЫ АВТОНОМНОГО СУДНА
ИПКАС позволяет задать район плавания, выбрать модель судна и судового оборудования, назначить алгоритмы управления и системы мониторинга, а также имитировать взаимодействие команды на судне и операторов на берегу. Одновременно в симуляции могут находиться автономные суда, дистанционно управляемые суда, суда с ручным управлением и суда-цели, создающие трафик в районе плавания. Все это дает возможность использовать Комплекс для обучения персонала и отработки сценариев взаимодействия между автономными судами и судами с ручным управлением в различное время суток и в различных погодных условиях.
Часто задаваемые вопросы
-
Что такое автономное судовождение?
Концепция морских автономных надводных судов (МАНС) была выдвинута Международной Морской Организацией (IMO) в 2017 году. В рамках этой концепции были выделены четыре уровня автономности для надводных автономных судов:
- Судно с автоматизированными процессами и поддержкой принятия решений с экипажем на борту:моряки присутствуют на борту для приведения в действие и контроля бортовых систем и функций. Некоторые операции могут быть автоматизированы и могут осуществляться в течение некоторого времени без контроля со стороны оператора при том, что на борту находятся моряки, готовые взять управление под свой контроль.
- Дистанционно управляемое судно с экипажем на борту: судно контролируется и управляется из другого места. При этом на борту судна остаются моряки, которые могут взять на себя контроль за бортовыми системами и функциями и управление ими.
- Дистанционно управляемое судно без экипажа на борту: судно контролируется и управляется из другого места. Моряков на борту нет.
- Полностью автономное судно: бортовая система управления операциями судна способна самостоятельно принимать решения и определять порядок действий.
-
Какие суда симулирует ИПКАС?
В ИПКАС заложена гибкая гидроаэродинамическая модель, позволяющая сконфигурировать практически любое судно, вне зависимости от типа движительно-рулевого комплекса, обводов корпуса или количества движителей. По умолчанию, в ИПКАС пользователю доступны несколько моделей судов различных типов.
Если представленных моделей судов недостаточно для вашего проекта, пожалуйста, свяжитесь с нами. Подготовкой и конфигурацией моделей судов занимаются разработчики ИПКАС.
Если ваш проект требует использования специализированной гидроаэродинамической модели, ИПКАС предоставит программный интерфейс для интеграции вашей модели в симуляцию. -
Какие системы ИПКАС эмулирует программно?
На текущем этапе в ИПКАС реализованы все основные модели судового оборудования и систем, необходимые для симуляции сценариев автономного судовождения и ручного управления судном, в том числе:
- Система пропульсивного комплекса судна
- Рулевой комплекс
- Балластная система
- Гирокомпас и магнитный компас
- Датчики глобальных спутниковых систем позиционирования
- Датчики положения и скорости судна
- Метеодатчики
- Системы локального позиционирования судна
Также мы можем расширить функциональность ИПКАС, включив в него специализированную систему или оборудование, необходимые для реализации вашего проекта.
Кроме того, открытый программный интерфейс ИПКАС дает возможность реализовать пользовательскую систему или оборудование самостоятельно и подключить их к симуляции. -
Какие судовые системы можно подключить к ИПКАС?
На данном этапе в ИПКАС реализовано подключение к системе динамического позиционирования и электронно-картографической системе. Однако его архитектура спроектирована с возможностью подключения широкого спектра внешних систем и оборудования.
Если для реализации вашего проекта необходимо подключить к ИПКАС специальную судовую систему, пожалуйста, свяжитесь с нами. -
Как получить доступ к ИПКАС?
Для получения доступа к ИПКАС, свяжитесь с нами по телефону или заполнив форму обратной связи.